Lesson Contents
EIGRP external routes use an AD (Administrative Distance) of 170. When two sources are advertising the same route, then it’s up to the metric to decide which one we will install in the routing table. When the metric is equal, EIGRP will install both routes as successor routes, and that’s it.
What I explained above is only true when all EIGRP routers are using the same AS number. When you use more than one AS number, something else will happen…
To demonstrate this, I’ll use the following three routers:
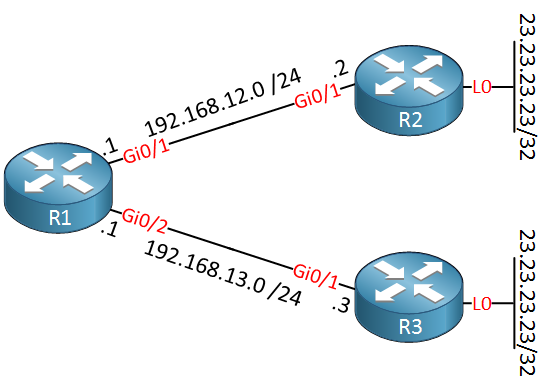
Above we have three routers. R2 and R3 have a loopback interface with the same IP address (23.23.23.23) which we’ll redistribute into EIGRP.
Configuration
External route – Same AS Number
Let’s start with an example where all routers are using the same AS number. Here’s the configuration of all routers:
R1(config)#router eigrp 1
R1(config-router)#no auto-summary
R1(config-router)#network 192.168.12.0 0.0.0.255
R1(config-router)#network 192.168.13.0 0.0.0.255R2(config-if)#router eigrp 1
R2(config-router)#no auto-summary
R2(config-router)#network 192.168.12.0 0.0.0.255
R2(config-router)#redistribute connected metric 1 1 1 1 1R3(config)#router eigrp 1
R3(config-router)#no auto-summary
R3(config-router)#network 192.168.13.0 0.0.0.255
R3(config-router)#redistribute connected metric 1 1 1 1 1R2 and R3 will redistribute all directly connected interfaces that don’t have a network command, in our case that’s only the loopback interface. Here’s what the routing table of R1 looks like:
R1#show ip route eigrp
23.0.0.0/32 is subnetted, 1 subnets
D EX 23.23.23.23
[170/2560000512] via 192.168.13.3, 00:01:16, GigabitEthernet0/2
[170/2560000512] via 192.168.12.2, 00:01:16, GigabitEthernet0/1R1 has install two successor routes. This makes sense since the AD and metric are both the same.
External Route – Different AS
Let’s try something else…R1 and R2 will remain in AS 1 but between R1 and R3 I’m going to use AS 3. Let’s change the configurations:
R1(config)#router eigrp 1
R1(config)#no network 192.168.13.0
R1(config)#router eigrp 3
R1(config-router)#network 192.168.13.0 0.0.0.255 R3(config)#no router eigrp 1
R3(config)#router eigrp 3
R3(config-router)#network 192.168.13.0 0.0.0.255
R3(config-router)#redistribute connected metric 1 1 1 1 1Here’s what the routing table of R1 looks like now:
R1#show ip route eigrp
23.0.0.0/32 is subnetted, 1 subnets
D EX 23.23.23.23
[170/2560000512] via 192.168.12.2, 00:00:04, GigabitEthernet0/1Only one entry remains…the path through R2. Why? Let’s see if we can find an answer in the EIGRP topology table:
R1#show ip eigrp topology
EIGRP-IPv4 Topology Table for AS(1)/ID(192.168.13.1)
Codes: P - Passive, A - Active, U - Update, Q - Query, R - Reply,
r - reply Status, s - sia Status
P 192.168.12.0/24, 1 successors, FD is 2816
via Connected, GigabitEthernet0/1
P 23.23.23.23/32, 1 successors, FD is 2560000512
via 192.168.12.2 (2560000512/2560000256), GigabitEthernet0/1
EIGRP-IPv4 Topology Table for AS(3)/ID(192.168.13.1)
Codes: P - Passive, A - Active, U - Update, Q - Query, R - Reply,
r - reply Status, s - sia Status
P 192.168.13.0/24, 1 successors, FD is 2816
via Connected, GigabitEthernet0/2
P 23.23.23.23/32, 0 successors, FD is Infinity
via 192.168.13.3 (2560000512/2560000256), GigabitEthernet0/2Above you can see that the path through R3 has been set to infinity. This doesn’t make much sense since the metric remained the same. To figure out what is really going on, we’ll have to do a little experiment. First I will shut all interfaces on R1:
R1(config)#interface Gi0/1
R1(config-if)#shutdown
R1(config)#interface Gi0/2
R1(config-if)#shutdownBefore I reenable all interfaces, we’ll enable a debug:
R1#debug ip routing
IP routing debugging is onThe debug ip routing command is very useful as it will tell you when and why certain routes are installed in the routing table. Let’s enable the interface that connects to R3 first:
R1(config)#interface Gi0/2
R1(config-if)#no shutdownWe can now see that R1 installs the route in its routing table:
R1#
RT: updating eigrp 23.23.23.23/32 (0x0) :
via 192.168.13.3 Gi0/2 0 1048578So far so good, R1 has installed the path through R3. Let’s enable the interface that connects to R2:
R1(config)#interface GigabitEthernet 0/1
R1(config-if)#no shutdownThis is where the magic happens:
R1#
RT: updating eigrp 23.23.23.23/32 (0x0) :
via 192.168.12.2 Gi0/1 0 1048578
RT: closer admin distance for 23.23.23.23, flushing 1 routes
RT: add 23.23.23.23/32 via 192.168.12.2, eigrp metric [170/2560000512]
RT: updating eigrp 23.23.23.23/32 (0x0) :
via 192.168.13.3 Gi0/2 0 1048578Above we can see that R1 removes the path through R3 and installs the path through R2. It’s showing us that it has a “closer admin distance”. The administrative distance however is the same but EIGRP does prefer the lower AS number. That’s why the path through R2 is preferred.
Configurations
Want to take a look for yourself? Here you will find the final configuration of each device.
R1
hostname R1
!
ip cef
!
interface GigabitEthernet0/1
ip address 192.168.12.1 255.255.255.0
duplex auto
speed auto
media-type rj45
!
interface GigabitEthernet0/2
ip address 192.168.13.1 255.255.255.0
duplex auto
speed auto
media-type rj45
!
router eigrp 1
network 192.168.12.0
!
router eigrp 3
network 192.168.13.0
!
endR2
hostname R2
!
ip cef
!
interface Loopback0
ip address 23.23.23.23 255.255.255.255
!
interface GigabitEthernet0/1
ip address 192.168.12.2 255.255.255.0
duplex auto
speed auto
media-type rj45
!
router eigrp 1
network 192.168.12.0
redistribute connected metric 1 1 1 1 1
!
endR3
hostname R3
!
ip cef
!
interface Loopback0
ip address 23.23.23.23 255.255.255.255
!
interface GigabitEthernet0/1
ip address 192.168.13.3 255.255.255.0
duplex auto
speed auto
media-type rj45
!
router eigrp 3
network 192.168.13.0
redistribute connected metric 1 1 1 1 1
!
endConclusion
EIGRP path selection is usually pretty straightforward but there’s a little twist when you use different AS numbers. When the AD and metric are the same, EIGRP will prefer the lower AS number.
Hi Rene
I have two notes about router one configuration :-
1 - In the configuration of external route – same AS number you need to advertising the 192.168.13.0 network or change the wildcard mask to 0.0.1.255 otherwise the router one and router three will not become neighbors.
2 - In the configuration of external route – different AS if you get rid of eigrp AS 1 we will lose the neighbor adjacency with router two.
please correct me if I wrong
Thanks a lot
Hi Hussein,
You are right, I left some errors in the configs…oops! Just fixed them, thanks
Rene
No thanks to the duty
Hi,
Is this External routes behaviour the same for Internal routes , i.e 2 different internal AS processes?
Cheers,
Rob
Hello Robert
External routes are defined as routes learned by an EIGRP process via redistribution. This redistribution can also take place from one EIGRP AS to another just like in the lesson. In the lesson, you can see that these routes are marked with the
EXdesignation, meaning they are indeed external routes.This behaviour of choosing the lower EIGRP AS as better takes place only when you have multiple AS’es configured within your EIGRP topology, and when the same route is learned from two different EIGRP AS processes.
Now when you say “internal routes,
... Continue reading in our forum